





In questo articolo trattaterò i seguenti argomenti chiave:
Nutanix Enterprise Cloud Platform:
descrive i componenti software Nutanix Enterprise Cloud Platform (ECP).
ECP Hyperconvergence Software:
descrive il fabric dello storage distribuito e dei suoi elementi. Ciò include i diversi componenti del cluster, i dettagli su come le unità fisiche sono segmentate, il percorso I/O e la protezione dei dati.
ECP Advanced Data Services:
descrive le tecniche di ottimizzazione della capacità, come la deduplicarla, la compressione e la codifica di cancellazione. Vengono inoltre visualizzati i dettagli su istantanee e cloni, cluster allargati e crittografia dei dati a riposo. Sono inoltre descritti il servizio di blocco e file, il supporto per Hyper-V e l’ambiente containerizzato (container).
Provisioning, Managing, and Monitoring:
descrive brevemente il sistema di gestione di Prism e una descrizione dei diversi strumenti e pacchetti utilizzati per la gestione e l’orchestrazione.
The Nutanix Competitive Landscape:
descrive la posizione competitiva di Nutanix nel mercato e la differenziazione tra ECP e la piattaforma Cisco HyperFlex.
Nutanix è stata fondata nel 2009 ed è uno dei principali attori nello spazio di iperconvergenza. Esso ha iniziato con una soluzione hardware e software che combina elaborazione e archiviazione in un’appliance modulare Rack Unit (RU) e un file system di archiviazione distribuito.E’ stato uno dei primi arrivati nello spazio di iperconvergenza e ha portato l’attenzione su questo mercato come valida alternativa ai mercati legacy Storage Area Network (SAN) e Network-Attached Storage (NAS).
Nel novembre 2017, Nutanix ha annunciato che avrebbe adottato una strategia incentrata sul software e che il codice open source sarebbe stato un elemento fondamentale del puro software di gioco dell’azienda. In un certo senso, Nutanix si è sempre concentrata sull’aspetto del software dell’iperconvergenza e ha collaborato con molti produttori di hardware OEM (OEM) come Lenovo e Dell EMC. Uno dei prodotti congiunti che ha trovato il successo sul mercato è stato il Dell EMC XC Series, che gestisce il software Nutanix.
Nutanix sta crescendo il suo portafoglio software e compete su più fronti. Nutanix è in competizione con VMware ESXi con l’Acropolis Hypervisor (AHV), basato su una macchina virtuale basata sul kernel (KVM). La memoria SDS (software-defined storage) di Nutanix, Acropolis, compete con vSAN e il software HyperFlex HX Data Platform. Sul fronte della rete, Nutanix sta lavorando duramente per migliorare il proprio portafoglio di reti utilizzando Open vSwitch (OVS) open source. Questa non è una piccola impresa; persino VMware ha dovuto acquisire società di software per ottenere la virtualizzazione della rete NSX e il portafoglio di sicurezza in forma. Nutanix utilizza OVS per lo switch virtuale distribuito come punto di partenza per il networking. Nel 2018, Nutanix ha annunciato Flow, una soluzione di rete definita dal software che consente l’impostazione e l’applicazione dei criteri a livello di macchina virtuale (VM). A partire dalla stesura di questo libro, Flow è paragonabile alla porzione di gestione basata su policy di NSX, ma è ancora basata su OVS e VLAN con funzionalità di switching L2 di base.
La seguente sezione discute in dettaglio i componenti Nutanix, il file system distribuito e i servizi dati avanzati. Non copre l’hardware di Nutanix in solidarietà con la decisione di Nutanix di essere più focalizzato sul software.
Nutanix Enterprise Cloud Platform
La Nutanix Enterprise Cloud Platform (ECP) è divisa in una suite di prodotti di gestione, pianificazione e automazione denominata Prism e una suite di prodotti di storage virtualizzati e definiti dal software denominata Acropolis. Il portafoglio cloud aziendale di alto livello di Nutanix è illustrato nella Figura 13-1.
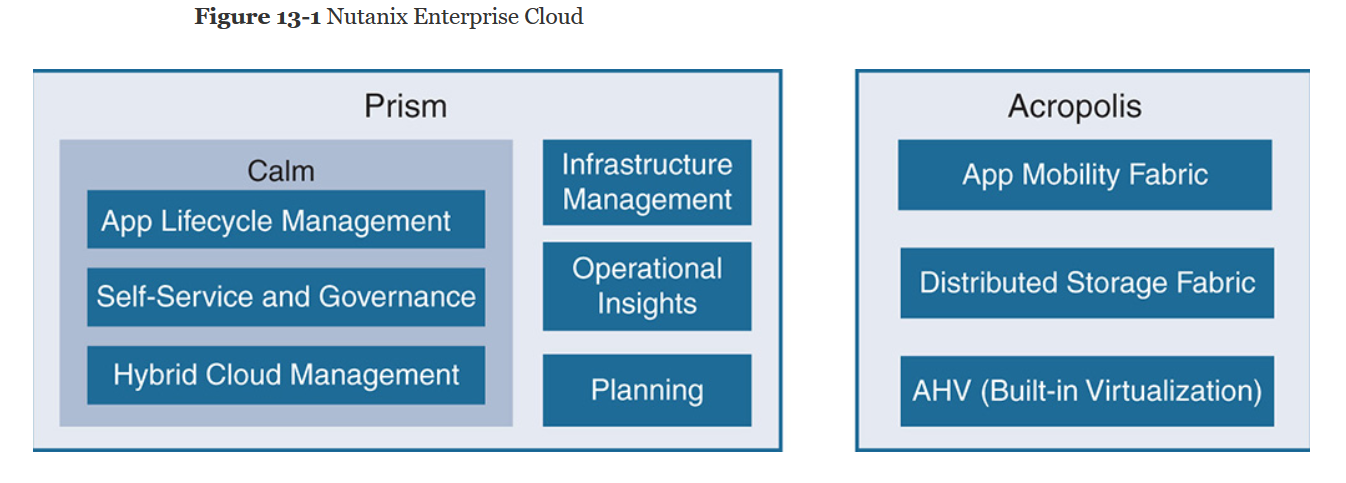
Nutanix è stato uno dei primi fornitori a rilasciare soluzioni che supportano più hypervisor: ESXi, Hyper-V e XenServer. Nutanix ha anche sviluppato l’hypervisor CentOS KVM, lo ha reso più resistente per l’ambiente aziendale e lo ha rilasciato come proprio AHV. Oltre al vantaggio tecnico di avere un hypervisor interno, c’è un grande vantaggio commerciale perché l’AHV è privo di licenza rispetto ai prezzi elevati che le aziende pagano per vSphere ESXi, che è concesso in licenza per socket della CPU.
Anche parte dell’architettura del software, Nutanix ha creato un livello di astrazione chiamato Application Mobility Fabric che si trova tra oggetti gestiti come VM, contenitori, volumi e l’hypervisor stesso. Ciò offre la flessibilità per le applicazioni che sfruttano tali oggetti per spostarsi tra lo stesso hypervisor o diversi hypervisor nello stesso cluster o persino un cluster privato e il cloud. Questo articolo si concentra principalmente sull’architettura SDS e tocca brevemente gli strumenti di gestione e orchestrazione. Molti dei dettagli tecnici in questo capitolo sono estratti da The Nutanix Bible, che approfondisce molto. Sebbene questo libro non copra i punti chiave dell’architettura, tenta di rimanere allo stesso livello di dettagli di HyperFlex e vSAN per scopi di confronto. Inoltre, analizza brevemente le funzionalità che erano già coperte da Cisco e VMware, in modo che non diventasse troppo ripetitivo.
ECP Hyperconvergence Software
Nutanix è stato uno dei pionieri nella creazione di software HCI. Il software di iperconvergenza ECP è costituito da più elementi, tra cui un file system distribuito che crea il pool di archiviazione e un set di moduli per gestire la gestione degli I/O, archiviare i metadati e gestire la replica e la distribuzione del carico. Successivamente, viene visualizzata una descrizione dettagliata di tali elementi, incluso il percorso di I/O di lettura e scrittura e la modalità di replica dei dati per la protezione all’interno del cluster.
Distributed Storage Fabric
Il distributed storage fabric (DSF) è il file system distribuito Nutanix (originariamente chiamato NDFS). Analogamente ad altre implementazioni HCI (hyperconverged Infrastructure) che richiedono un’appliance di archiviazione virtuale, Nutanix utilizza un controller VM (CVM) su ogni nodo per eseguire il file system. Nutanix consente l’utilizzo di più hypervisor, tra cui VMware ESXi, Microsoft Hyper-V, XenServer e il centOS KVM temprato come proprio hypervisor Acropolis AHV. I CVM sono raggruppati e lavorano insieme per formare il DSF, come mostrato nella Figura 13-2.
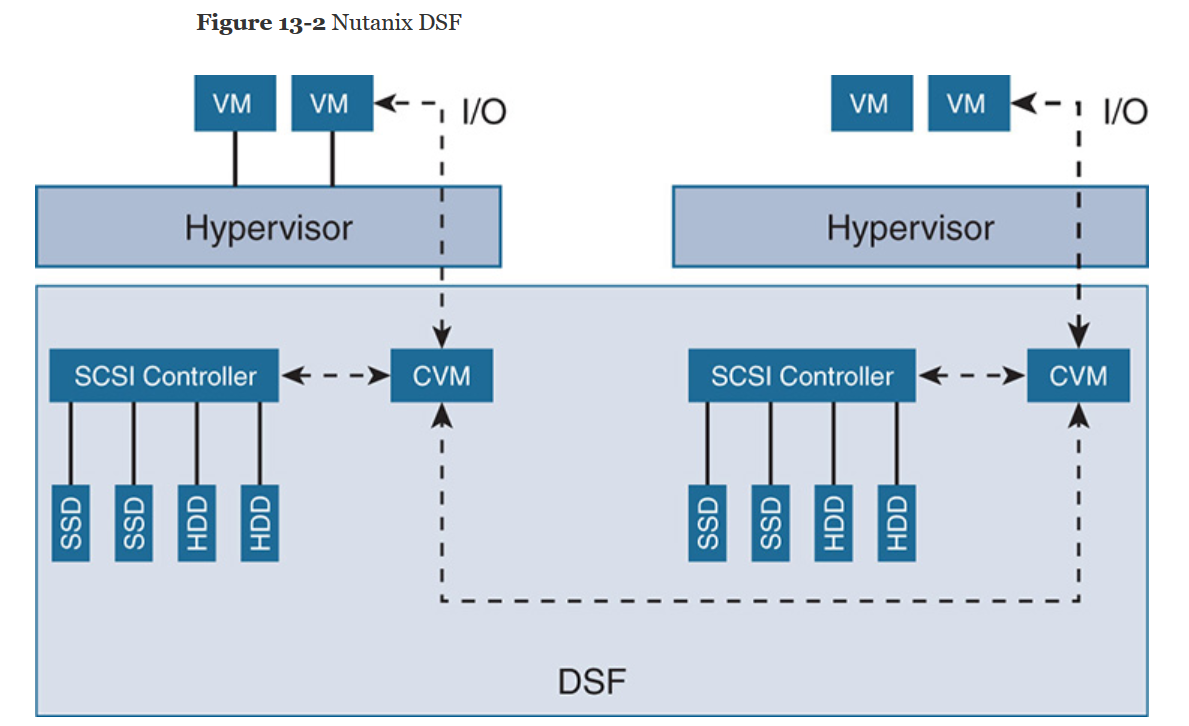
Il CVM consente a Nutanix di implementare le funzionalità dei servizi di dati come la deduplicazione, la compressione, la replica e altro. Il CVM definisce anche le interfacce I / O tra hypervisor e DSF. Nutanix supporta più interfacce; gli esempi sono Network File System (NFS), Internet Small Computer System Interface (iSCSI) e Server Message Block (SMB).
A differenza di altri fornitori che hanno limiti superiori sul numero di nodi in un cluster, Nutanix non specifica un limite superiore quando utilizza il proprio hypervisor AHV basato su KVM. Tuttavia, quando si utilizza vSphere ESXi, Nutanix specifica il limite di VMware, che è 64 nodi per cluster. Per i nodi periferici, Nutanix ha iniziato con un limite di 3 nodi come minimo e successivamente ha introdotto implementazioni di edge a 2 nodi e 1 nodo. Sebbene Nutanix stia uscendo dall’hardware stesso, il suo software supporta configurazioni OEM per nodi di storage pesanti, nodi di calcolo elevato e nodi di storage plus.
Il DSF definisce più costrutti di alto livello come questi:
Storage pool: include le unità fisiche come le unità a stato solido (SSD) e le unità a disco rigido (HDD).
Container: un pool logico di VM e vDisks che vengono presentati agli hypervisor come datastore (NFS, SMB, iSCSI).
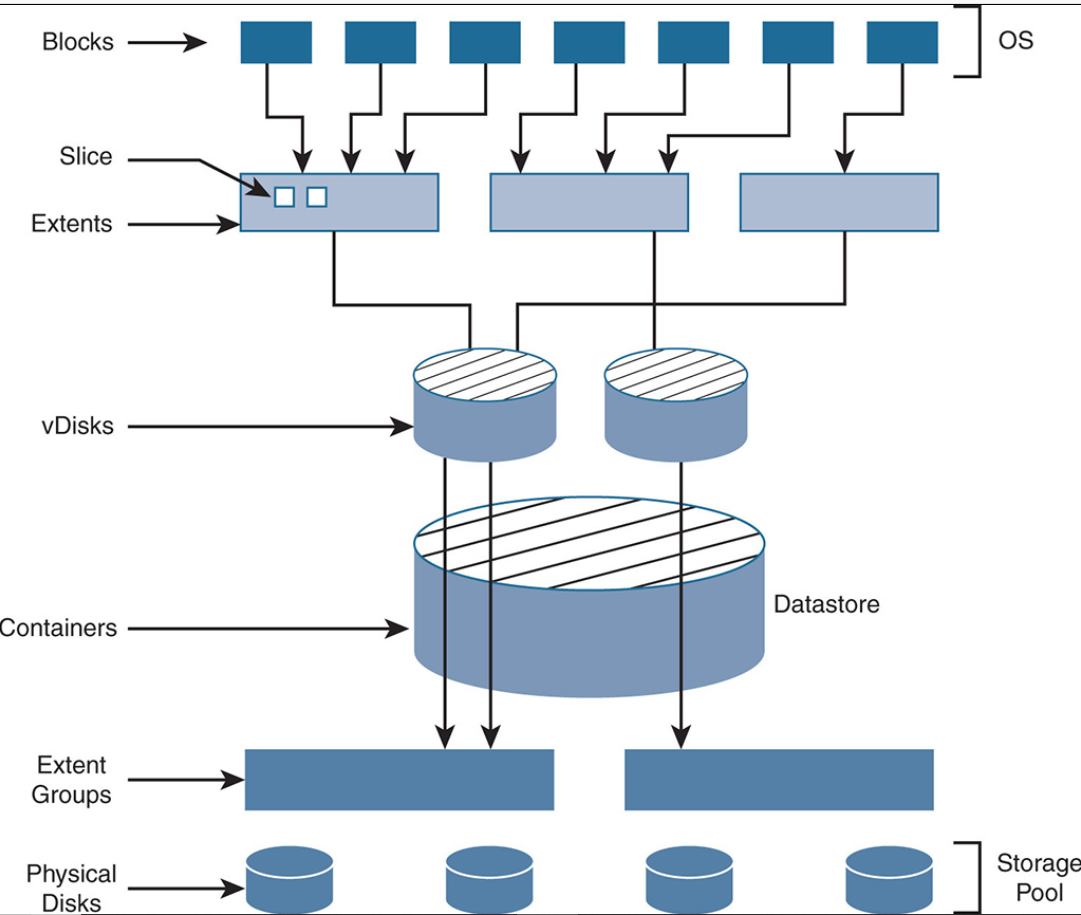
vDisks: file di dimensioni superiori a 512 KB che includono i file .vmdk. vDisk sono costruiti usando estensioni.
Extent: 1 MB di dati contigui “logici”. Un’estensione è formata da un numero di blocchi contigui, a seconda della dimensione del blocco del sistema operativo guest (SO). Le dimensioni tipiche dei blocchi sono comprese tra 4 KB e 8 KB. Le estensioni sono lette, scritte o modificate usando “fette”. Le fette sono anche da qualche parte tra 4 KB e 8 KB. Le estensioni sono distribuite su gruppi di estensione per l’analisi dei dati su più dischi fisici.
Extent groups: 1 MB o 4 MB di dati contigui “fisici”. I gruppi di estensione rappresentano blocchi contigui di dati sui dischi fisici e le estensioni sono distribuite su più gruppi di extent mediante slice. La gerarchia è meglio spiegata visivamente nella Figura 13-3.
Nutanix Cluster Components
Il cluster Nutanix comprende molti componenti, tra cui un gestore I / O, un database che contiene i metadati, un archivio di configurazione, un framework MapReduce, un gestore di replica, un gateway di gestione e altro. Le seguenti sono le definizioni di alcuni dei componenti.
Stargate: questo è l’I / O o il data manager. Facilita le richieste NFS, iSCSI o SMB3 provenienti dall’hypervisor.
Cassandra: si tratta di un archivio di metadati distribuito non Structured Query Language (NoSQL) per mantenere tutte le coppie di valori-chiave dei metadati del cluster in una struttura ad anello. È basato su un database Apache Cassandra modificato.
Zookeeper: questo è l’archivio di configurazione che conserva le informazioni di configurazione per host, dischi, indirizzi IP e così via.
Curator: si tratta di un framework MapReduce che è responsabile della gestione e della distribuzione delle attività in tutto il cluster. Map Reduce è un framework che divide le attività in blocchi più piccoli che vengono elaborati in parallelo in un cluster. Il curatore gestisce anche funzioni come il bilanciamento del disco, lo scrubbing dei dati, il tiering dei dati e la ricostruzione dei dati in caso di guasto del disco o del nodo.
Cerebro: responsabile della replica / disaster recovery (DR) responsabile della pianificazione degli snapshot e della gestione delle attività di replica e DR nei siti remoti, nonché della migrazione e del failover dei dati. Tutti i nodi eseguono il motore Cerebro e partecipano alla replica su siti remoti.
Prism: questo è il gateway di gestione per gli amministratori per configurare, gestire e monitorare i nodi. Fornisce interfacce tramite l’interfaccia a riga di comando Nutanix (NCLI), l’interfaccia utente grafica (GUI) tramite HTML5 e l’accesso alle API (Application Programming Interface).
Un elenco completo di componenti è descritto in The Nutanix Bible.
Physical Drive Breakdown
Le unità fisiche in un cluster Nutanix sono segmentate come segue per ospitare i diversi componenti, ad esempio CVM, cache e memoria permanente. Tutti i calcoli sono in gibibille (GiB) anziché in gigabyte, dove 1 GiB = 1024 MB, come mostrato nella Figura 13-4.
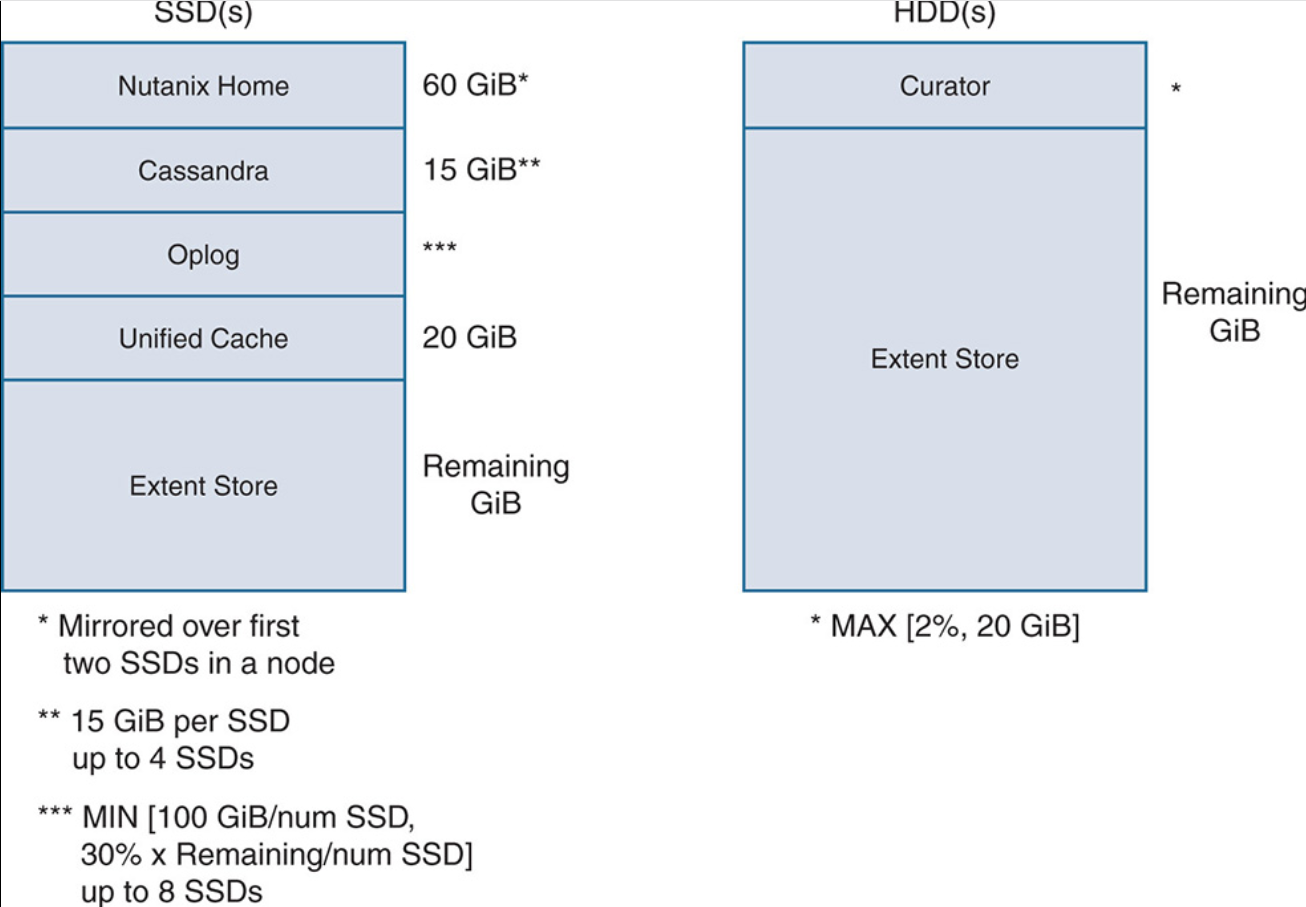
I diversi segmenti che costituiscono gli SSD e gli HDD includono l’home del controller VM, l’archivio dei metadati, un buffer di scrittura persistente, una cache di lettura dinamica, storage persistente e una gestione e pulizia del cluster MapReduce. Questo è descritto di seguito:
Nutanix Home: è qui che risiede il CVM e viene assegnato 60 GiB dallo storage SSD. La casa di Nutanix è specchiata rispetto ai primi due SSD in un nodo.
Cassandra: questo è l’archivio dei metadati che contiene tutte le informazioni rilevanti sui dati, come la sua posizione su disco, un’impronta digitale che identifica in modo specifico i dati e così via. I metadati sono assegnati a 15 GiB per SSD. Se ci sono due SSD, Cassandra viene eseguito il mirroring e consuma 15 GiB per SSD. Se ci sono quattro o più SSD, Cassandra è condiviso da un massimo di 4 SSD per un totale di 60 GiB.
Oplog: questa è l’area dell’SSD che viene utilizzata come buffer di scrittura permanente per fondere i dati prima che vengano scritti nell’archivio di estensione. La dimensione di Oplog per nodo è dinamica e viene presa come il 30% della capacità dell’SSD formattato dopo aver dedotto la dimensione della casa di Nutanix e Cassandra, o un minimo di 100 GiB. La capacità di Oplog è distribuita su un massimo di 8 SSD in un nodo.
Unified Cache: questa è la porzione dell’SSD utilizzata come cache di lettura dinamica. Si estende la memoria allocata al CVM e all’SSD. La dimensione della cache del contenuto è 20 GiB.
Extent store: questa è la parte dell’SSD o dell’HDD utilizzata per la memorizzazione persistente. Vale la pena notare che l’estensione dell’archiviazione in un nodo Nutanix potrebbe essere una combinazione di SSD e HDD per nodi ibridi o SSD solo per nodi all-flash. Questo è diverso da quello che hai visto con HyperFlex e vSAN, dove un nodo ibrido utilizza solo HDD per la capacità. Pertanto, l’architettura Nutanix per nodi ibridi ha un tocco di “storage tiering”, che è stato discusso nel Capitolo 2, “Storage Networks: Existing Designs”. Nel tiering dello storage, i trasferimenti di dati tra i livelli HDD e SSD dipendono dalla frequenza di accesso.
Curator: questa è la gestione e pulizia del cluster MapReduce. Per gli HDD, una parte della memoria è riservata alla memoria del curatore e viene allocata (a seconda della versione del software Nutanix) il massimo del 2% della capacità del disco o 20 GiB su un singolo HDD in un nodo. Il curatore viene eseguito su ogni nodo e viene selezionato un master. Se si verifica un errore, altri curatori eseguono il compito.